一种球轮结构(专利号 ZL 201720194022.5)
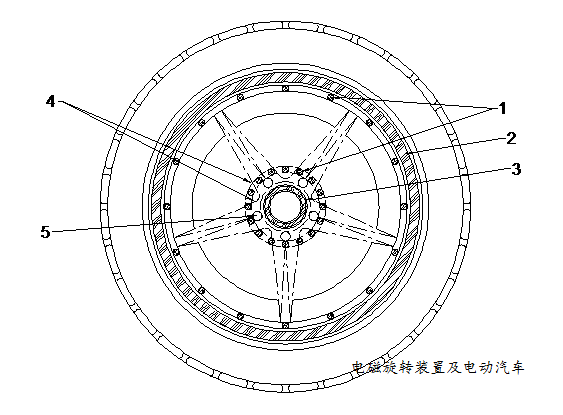
电磁驱动装置及电动汽车(专利号 201822190733.2)
一种球轮结构,以球体的万向为主体作转动旋转,借以支架的辅助固定,结构包括球形轮和外壳,球形轮的一端与地面接触,外壳覆盖于球形轮的另一端,球形轮与外壳之间能够相对转动。
电磁驱动装置,修改现用车轮,在车轮轮毂处添加相应电磁感应装置,由汽车总动力为各轮提供主动力,各轮电磁装置辅助动力与制动。
电磁驱动车轮
电磁驱动车轮,车轮以电磁感应方式做相对运动,相比新疆拜尔克・拜布提磁悬浮轮胎,在相近原理保证动力情况下对车轮的控制更加稳定。整体装置以改造轮毂的方式形成新的轮毂形式,电磁生成装置、电磁感应装置置于不同位置而具有不同功能,同心圆筒形的电磁生成装置可置于轮毂内外两侧,内外形成电磁感应所需环境,其中安置电磁感应设备并固定于轮毂之上,借由电磁感应产生动力从而使轮子运动。实际应用中,常规操作可以利用电磁作为车轮的辅助动力以及控制制动,在未来可以搭配5G技术、无人驾驶技术,取消车轴,使每个车轮可以精准控制,达到单轮自转,整体可以实现汽车原地转向。
不完整球轮车轮
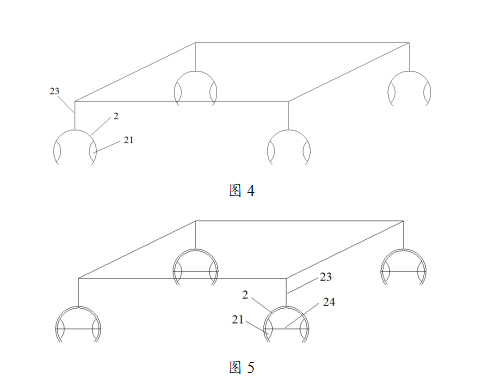
不完整球轮运用存在由易到难的过程,第一阶段仅是改变轮毂形态,由近似圆柱形改为不完整球体(如图2),实际运行方式与现行相近,可做车轮的改装。第二阶段取消两轮一轴结构,每个车轮可独立控制,汽车发动机提供总动力,分别传输给各个车轮,通过加装在车轮内部的动力装置输出动力,不需要车轴以及差速器,最为明显的改变是在汽车转弯时,汽车是整体向一个方向运行,而非车尾随着车头运行,此外,单轮的控制可以实现汽车的原地转向,最直观的实用效果如侧方停车时汽车可垂直进入车位(如图3)。除了车轮主体之外,还需安装车轮所要搭配的支架,球轮支架有以下两种安装方式(如图4、5),图4为无轴设计,两侧凹处支架辅助带动车轮;图5为单轮轴设计,由轴间接带动车轮。与电磁驱动车轮相同的是,在即将到来的5G时代,球形轮可以更好的搭配无人驾驶技术,特有的弧度可以支持转向时更加便捷。
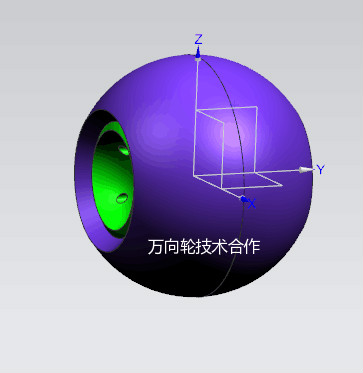
图2
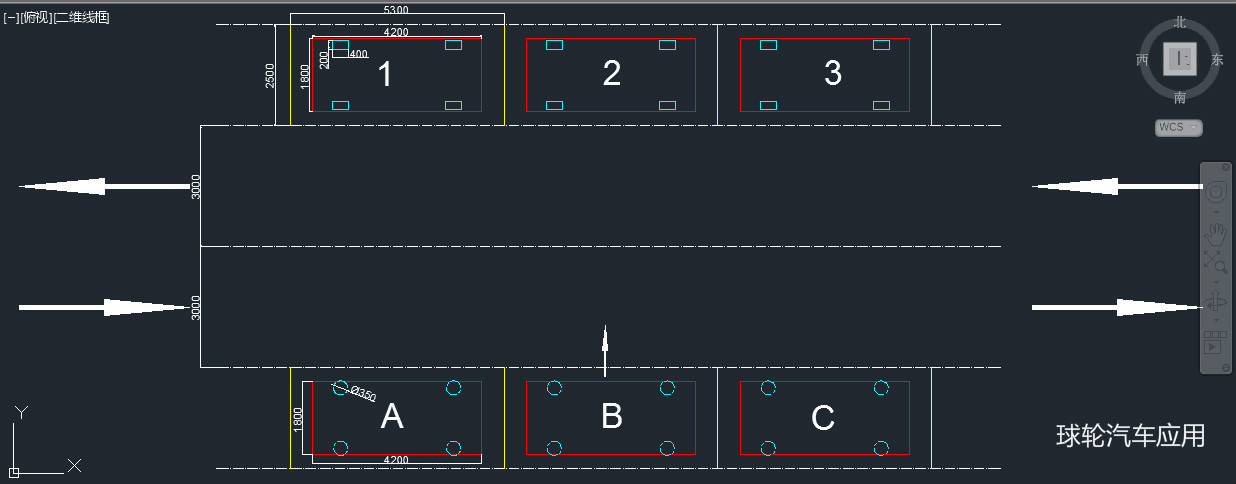
图3
完整球体车轮
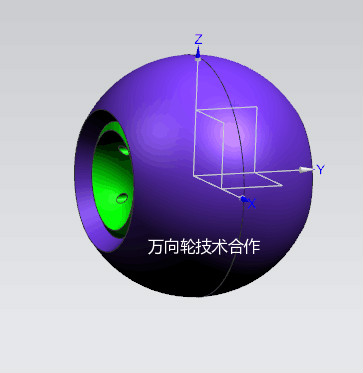
完整球体车轮(如图6、7),由于与底盘无直接接触点,车轮整体采用电磁感应方式运行,外加球壳(即球轮控制装置)保证球轮不脱离车体;车轮采用磁生电、电生磁的相互关系,以电磁力为直接表现。图6所示采用2组互不影响的电磁组,一组以异性吸引磁力控制转向,一组以同性排斥磁力提供动力;图7所示采用一组电生磁―磁生电系统为内部转向供电,采用一组全面的电生磁系统提供动力与制动控制。外置的球轮支架辅助球轮完成车轮的功能,依实际设计作出相应修正。完整球轮的设计依个人条件所限,目前仅是初步的设计与简单验证。
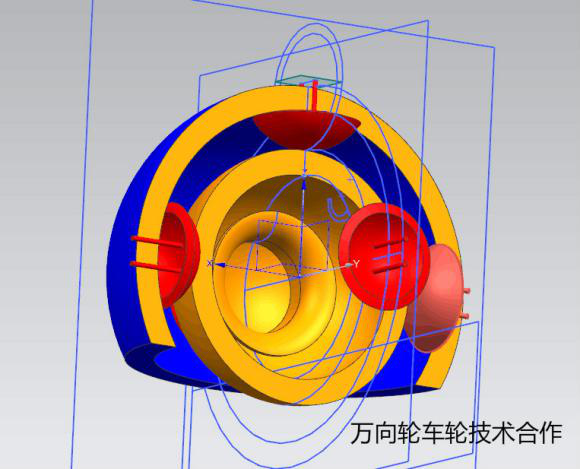
图6
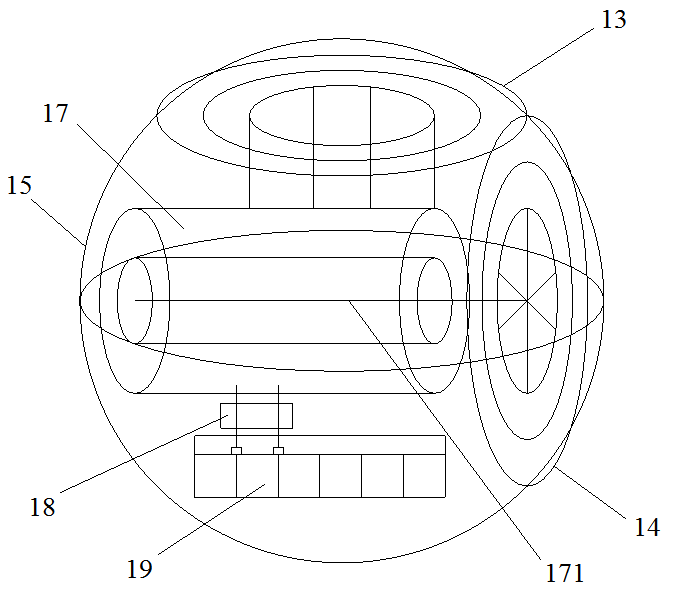
图7
不论是电磁驱动车轮还是球形轮,由于控制方式的改变,常用的人力控制不足以发挥两者该有的功能,相反,无人驾驶技术、5G技术的应用可以更好的融合运用两种技术,新的驾驶方式。

|